This time, I've given up on svg and am using png. The inline svg seems to be totally stripped out by github's markdown->html conversion, and img links don't work because .svg files are served with an incorrect Content-Type.
12 KiB
Moonfire NVR Time Handling
Status: draft
A man with a watch knows what time it is. A man with two watches is never sure.
— Segal's law
Objective
Maximize the likelihood Moonfire NVR's timestamps are useful.
The timestamp corresponding to a video frame should roughly match timestamps from other sources:
- another video stream from the same camera. Given a video frame from the "main" stream, a video frame from the "sub" stream with a similar timestamp should have been recorded near the same time, and vice versa. This minimizes confusion when switching between views of these streams, and when viewing the "main" stream timestamps corresponding to a motion event gathered from the less CPU-intensive "sub" stream.
- on-camera motion events from the same camera. If the video frame reflects the motion event, its timestamp should be roughly within the event's timespan.
- streams from other cameras. Recorded views from two cameras of the same event should have similar timestamps.
- events noted by the owner of the system, neighbors, police, etc., for the purpose of determining chronology, to the extent those persons use accurate clocks.
Two segments of video recorded from the same stream of the same camera should not overlap. This would make it impossible for a user interface to present a simple timeline for accessing all recorded video.
Durations should be useful over short timescales:
- If an object's motion is recorded, distance travelled divided by the duration of the frames over which this motion occurred should reflect the object's average speed.
- Motion should appear smooth. There shouldn't be excessive frame-to-frame jitter due to such factors as differences in encoding time or network transmission.
This document describes an approach to achieving these goals when the following statements are true:
- the NVR's system clock is within a second of correct on startup. (True when NTP is functioning or when the system has a real-time clock battery to preserve a previous correct time.)
- the NVR's system time does not experience forward or backward "step" corrections (as opposed to frequency correction) during operation.
- the NVR's system time advances at roughly the correct frequency. (NTP achieves this through frequency correction when operating correctly.)
- the cameras' clock frequencies are off by no more than 500 parts per million (roughly 43 seconds per day).
- the cameras are geographically close to the NVR, so in most cases network transmission time is under 50 ms. (Occasional delays are to be expected, however.)
- the cameras issue at least one RTCP sender report per recording.
- the cameras are occasionally synchronized via NTP.
When one or more of those statements are false, the system should degrade gracefully: preserve what properties it can, gather video anyway, and when possible include sufficient metadata to assess trustworthiness.
Additionally, the system should not require manual configuration of camera frequency corrections.
Background
Time in a distributed system is notoriously tricky. Falsehoods programmers believe about time and More falsehoods programmers believe about time; "wisdom of the crowd" edition give a taste of the problems encountered. These problems are found even in datacenters with expensive, well-tested hardware and relatively reliable network connections. Moonfire NVR is meant to run on an inexpensive single-board computer and record video from budget, closed-source cameras, so such problems are to be expected.
Moonfire NVR typically has access to the following sources of time information:
- the local
CLOCK_REALTIME. Ideally this is maintained byntpd: synchronized on startup, and frequency-corrected during operation. A hardware real-time clock and battery keep accurate time across restarts if the network is unavailable on startup. In the worst case, the system has no real-time clock or no battery and a network connection is unavailable. The time is far in the past on startup and is never corrected or is corrected via a step while Moonfire NVR is running. - the local
CLOCK_MONOTONIC. This should be frequency-corrected byntpdand guaranteed to never experience "steps", though its reference point is unspecified. - the local
ntpd, which can be used to determine if the system is synchronized to NTP and quantify the precision of synchronization. - each camera's clock. The ONVIF specification mandates cameras must support synchronizing clocks via NTP, but in practice cameras appear to use SNTP clients which simply step time periodically and provide no interface to determine if the clock is currently synchronized. This document's author owns several cameras with clocks that run roughly 100 ppm fast (9 seconds per day) and are adjusted via steps.
- the RTP timestamps from each of a camera's streams. As described in RFC 3550 section 5.1, these are monotonically increasing with an unspecified reference point. They can't be directly compared to other cameras or other streams from the same camera. Emperically, budget cameras don't appear to do any frequency correction on these timestamps.
- in some cases, RTCP sender reports, as described in RFC 3550 section 6.4. These correlate RTP timestamps with the camera's real time clock. However, these are only sent periodically, not necessarily at the beginning of the session. Some cameras omit them entirely depending on firmware version, as noted in this forum post. Additionally, Moonfire NVR currently uses ffmpeg's libavformat for RTSP protocol handling; this library exposes these reports in a limited fashion.
The camera records video frames as in the diagram below:
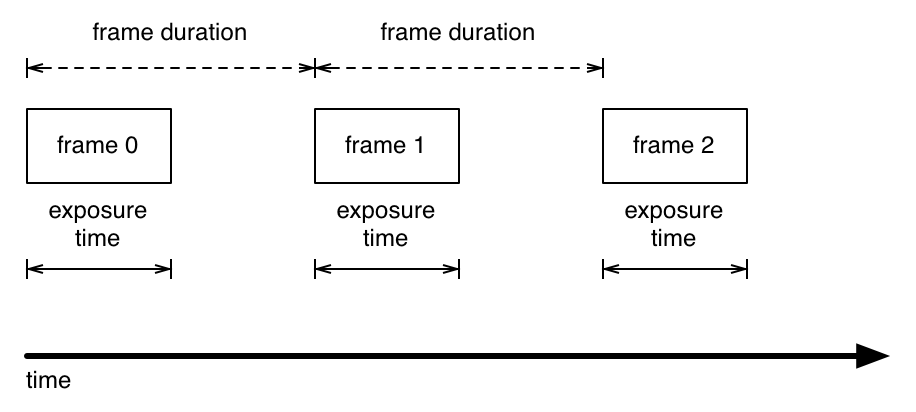
Each frame has an associated RTP timestamp. It's unclear from skimming RFC 3550 exactly what time this represents, but it must be some time after the last frame and before the next frame. At a typical rate of 30 frames per second, this timespan is short enough that this uncertainty won't be the largest source of time error in the system. We'll assume arbitrarily that the timestamp refers to the start of exposure.
RTP doesn't transmit the duration of each video frame; it must be calculated from the timestamp of the following frame. This means that if a stream is terminated, the final frame has unknown duration.
As described in schema.md, Moonfire NVR saves RTSP video streams into roughly one-minute "recordings", with a fixed rotation offset after the minute in the NVR's wall time.
Overview
Moonfire NVR will use the RTP timestamps to calculate video frames' durations. For the first segment of video, it will trust these completely. It will use them and the NVR's wall clock time to establish the start time of the recording. For following segments, it will slightly adjust durations to compensate for difference between the frequencies of the camera and NVR clock, trusting the latter to be accurate.
Detailed design
On every frame of video, Moonfire NVR will get a timestamp from
CLOCK_MONOTONIC. On the first frame, it will additionally get a timestamp
from CLOCK_REALTIME and compute the difference. It uses these to compute a
monotonically increasing real time of receipt for every frame, called the
local frame time. Assuming the local clock is accurate, this time is an
upper bound on when the frame was generated. The difference is the sum of the
following items:
- H.264 encoding
- buffering on the camera (particularly when starting the stream—some cameras apparently send frames that were captured before the RTSP session was established)
- network transmission time
These values may produce some jitter, so the local frame time is not directly used to calculate frame durations. Instead, they are primarily taken from differences in RTP timestamps from one frame to the next. During the first segment of video, these RTP timestamp differences are used directly, without correcting for incorrect camera frequency. At the design limit of 500 ppm camera frequency error, and an upper bound of two minutes of recording for the initial segment (explained below), this causes a maximum of 60 milliseconds of error.
The local start time of a segment is calculated when ending it. It's defined as the minimum for all frames of the local frame time minus the duration of all previous frames. If there are many frames, this means neither initial buffering nor spikes of delay in H.264 encoding or network transmission cause the local start time to become inaccurate. The least delayed frame wins.
The first segment either ends with the RTSP session (due to error/shutdown) or on rotation. In the former case, there may not be many samples to use in calculating the local start time; accuracy may suffer but the system degrades gracefully. Rotation doesn't happen until the second time the rotation offset is passed, so rotation happens after 1–2 minutes rather than 0–1 minutes to maximize accuracy.
The start time of the first segment is its local start time. The start time of following segments is the end time of the previous segment.
The duration of following segments is adjusted to compensate for camera frequency error, assuming the NVR clock's frequency is more trustworthy. This is done as follows. The local duration of segment i is calculated as the local start time of segment i+1 minus the local start time of segment i. The cumulative error as of segment i is defined as the local duration of all previous segments minus the duration of all previous segments. The duration of segment i should be adjusted by up to 500 ppm to eliminate cumulative error. (For a one-minute segment, this is 0.3 ms, or 27 90kHz units.) This correction should be spread out across the segment to minimize jitter.
Each segment's local start time is also stored in the database as a delta to the segment's start time. These stored values aren't for normal system operation but may be handy in understanding and correcting errors.
Caveats
There's no particular reason to believe this will produce perfectly matched streams between cameras or even of main and sub streams within a camera. If this is insufficient, there's an alternate calculation of start time that could be used in some circumstances: the camera start time. The first RTCP sender report could be used to correlate a RTP timestamp with the camera's wall clock, and thus calculate the camera's time as of the first frame.
The start time of the first segment could be either its local start time or its camera start time, determined via the following rules:
- if there is no camera start time (due to the lack of a RTCP sender report), the local start time wins by default.
- if the camera start time is before 2016-01-01 00:00:00 UTC, the local start time wins.
- if the local start time is before 2016-01-01 00:00:00 UTC, the camera start time wins.
- if the times differ by more than 5 seconds, the local start time wins.
- otherwise, the camera start time wins.
These rules are a compromise. When a system starts up without NTP or a clock battery, it typically reverts to a time in the distant past. Therefore times before Moonfire NVR was written should be checked for and avoided. When both systems have a believably recent timestamp, the local time is typically more accurate, but the camera time allows a closer match between two streams of the same camera.
This still doesn't completely solve the problem, and it's unclear it is even better. When using camera start times, different cameras' streams may be mismatched by up twice the 5-second threshold described above. This could even happen for two streams within the same camera if a significant step happens between their establishment. More frequent SNTP adjustments may help, so that individual steps are less frequent. Or Moonfire NVR could attempt to address this with more complexity: use sender reports of established RTSP sessions to detect and compensate for these clock splits.
It's unclear if these additional mechanisms are desirable or worthwhile. The simplest approach will be adopted initially and adapted as necessary.